고려대학교 교수소개
Knowledge & Innovation

- 공과대학
- 기계공학부
- 박신석
소개

Prof. Shinsuk Park
Human-Machine Systems Lab.
Tel: 02-3290-3373
Email: drsspark@korea.ac.kr
- About Professor
- About Laboratory
- Publication
- Research
- Teaching
- Lab Members
Profile
박신석
Professor, School of Mechanical Engineering, Korea University
Office: 321, Innovation Hall, 145, Anam-ro, Seongbuk-gu, Seoul, Republic of Korea
Email: drsspark@korea.ac.kr
Lab.Tel: 02-3290-3868
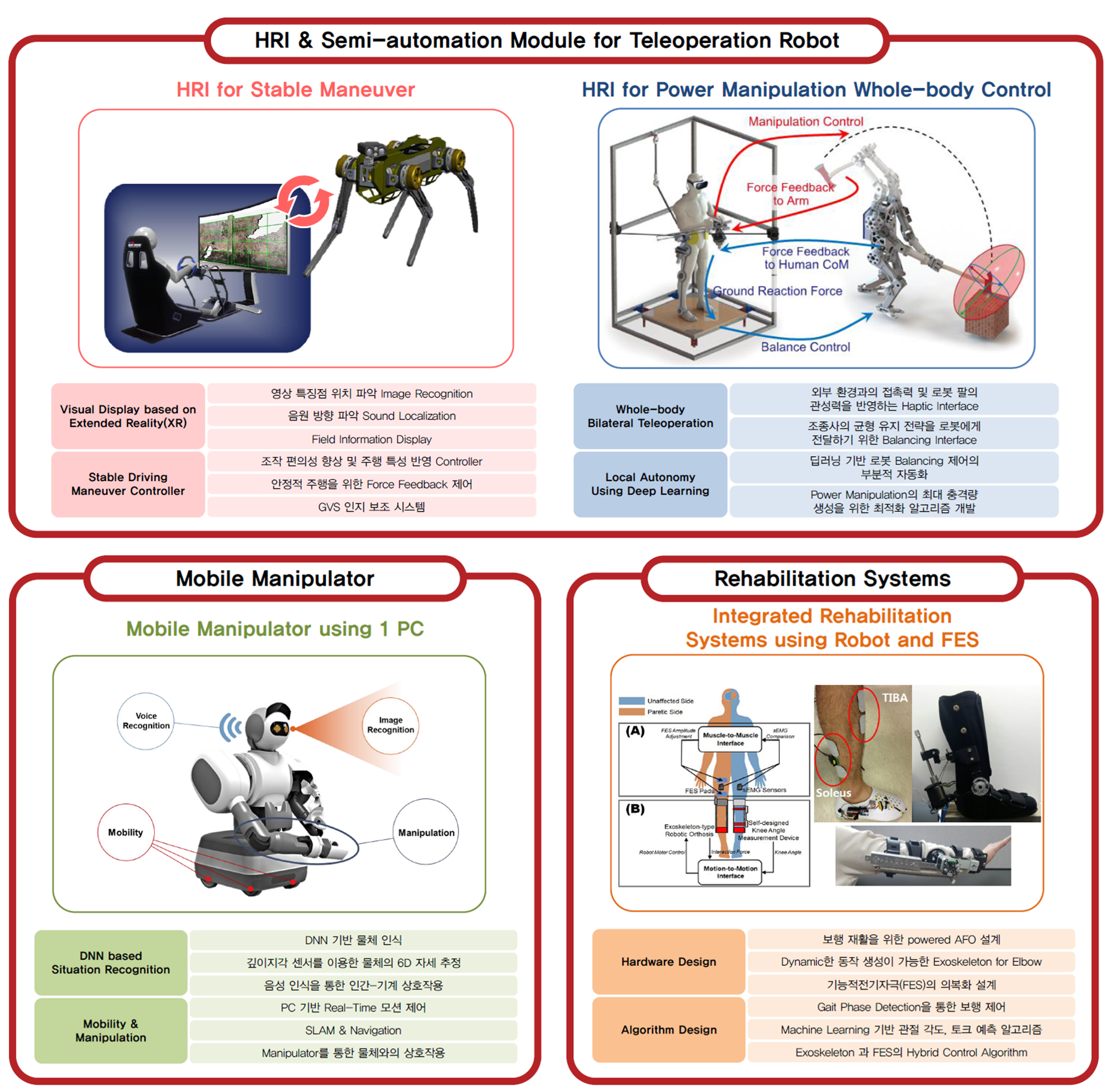
연구분야
Robot Manipulator
Haptics/Force Feedback
Augmented Reality
Human-Machine Interface
Human-Human Interface
EMG – FES System
주요 경력
1999
1999
MIT 기계공학 박사
1999 -
2000
Nissan 자동차 방문연구원
2000 -
2002
Harvard 대학교 Postdoctor
2002 -
2004
Keio 대학교 방문 교수
2010 -
2011
Harvard 의대 방문교수
2004 -
현재
고려대 기계공학부 교수
Laboratory

Publication
국제학술지
Jung, S., Bong, J. H., Kim, K., & Park, S. (2024). Machine-learning-based coordination of powered andkle-foot orthosis and functional electrical stimulation for gait control. Frontiers in Bioengineering and Biotechnology, 11, 1272693.
Lee, B., Park, J. S., Park, S., & Kim, C. H. (2023). Ankle Foot Orthosis for Patients with Drop Foot Using Shape-Memory-Alloy Actuators. International Journal of Precision Engineering and Manufacturing, 24(11), 2057-2072.
Park, J. S., Lee, B., Park, S., & Kim, C. H. (2023). Estimation of Stride Length, Foot Clearance, and Foot Progression Angle Using UWB Sensors. Applied Sciences, 13(8), 4801.
Bong, J. H., Jung, S., Kim, J., & Park, S. (2022). Standing Balance Control of a Bipedal Robot Based on Behavior Cloning. Biomimetics, 7(4), 232.
Bong, J. H., Choi, S., Hong, J., & Park, S. (2022). Force feedback haptic interface for bilateral teleoperation of robot manipulation. Microsystem Technologies, 28(10), 2381-2392.
Choi, S., & Park, S. (2021). Development of smart mobile manipulator controlled by a single windows PC equipped with real-time control software. International Journal of Precision Engineering and Manufacturing, 22, 1707-1717.
Jung, S., Bong, J. H., Kim, S. J., & Park, S. (2021). DNN-Based FES Control for Gait Rehabilitation of Hemiplegic Patients. Applied Sciences, 11(7), 3163.
Kim, J., Moon, H. S., Lee, S. J., Lee, J. M., Park, S., & Kim, S. J. (2020). Foot Pressure Feedback Pneumatic Orthosis: Implication of Daily Life Walking Training for Knee Osteoarthritis Patients. International Journal of Precision Engineering and Manufacturing, 21(11), 2191-2198.
Lee, C. M., Park, J., Park, S., & Kim, C. H. (2020). Fall-detection algorithm using plantar pressure and acceleration data. International Journal of Precision Engineering and Manufacturing, 21(4), 725-737.
Bong, J. H., Jung, S., Park, N., Kim, S. J., & Park, S. (2020). Development of a novel robotic rehabilitation system with muscle-to-muscle interface. Frontiers in neurorobotics, 14, 3.
Baik, S., Park, S., & Park, J. (2020). Haptic glove using tenson-driven soft robotics mechanism. Frontiers in bioengineering and biotechnology, 8, 1094.
Joe, H., Pahk, K. J., Park, S., & Kim, H. (2019). Development of a subject-specific guide system for Low-Intensity Focused Ultrasound (LIFU) brain stimulation. Computer methods and programs in biomedicine, 176, 105-110.
Park, C., Park, S., Hong, H., Jeon, I. H., & Kim, K. (2018). Development of an end-effector device for loose body removal in hip arthroscopy. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 232(10), 987-998.
Jung, C., Jung, S., Chun, M. H., Lee, J. M., Park, S., & Kim, S. J. (2018). Development of Gait Rehabilitation System Capable of Assisting Pelvic Movement of Normal Walking. Acta Medica Okayama, 72(4), 407-417.
Park, C. M., Kwon, S. I., Hong, H., Kang, S., Jeon, I. H., Park, S., & Kim, K. (2018). Development and preclinical trials of a wire-driven end effector device for frozen shoulder treatment. Medical & biological engineering & computing, 56(7), 1149-1160.
Bong, J. H., Song, H. J., Oh, Y., Park, N., Kim, H., & Park, S. (2018). Endoscopic navigation system with extended field of view using augmented reality technology. The International Journal of Medical Robotics and Computer Assisted Surgery, 14(2), e1886.
Park, S., Oh, Y., & Hong, D. (2017). Disaster response and recovery from the perspective of robotics. International Journal of Precision Engineering and Manufacturing, 18(10), 1475-1482.
Bong, J. H., Kim, H., & Park, S. (2017). Development of a surgical navigation system for corrective osteotomy based on augmented reality. International Journal of Precision Engineering and Manufacturing, 18(7), 1057-1062.
Choi, J. H., Jung, C., Kim, Y., Kim, C. H., Park, S., Cho, K. J., & Kim, S. J. (2017). Virtual coupling triggering for interaction force reduction of haptic free-motion using surface EMG. International Journal of Precision Engineering and Manufacturing, 18(7), 1013-1020.
Kim, I. H., Bong, J. H., Park, J., & Park, S. (2017). Prediction of driver’s intention of lane change by augmenting sensor information using machine learning techniques. Sensors, 17(6), 1350.
Jung, S., Jung, G., Lee, H., Lee, W., Song, H., & Park, S. (2016). Design and analysis of ballistic ground scanning system based on dynamics simulation. International Journal of Precision Engineering and Manufacturing, 17(1), 125-130.
Kim, H., Lee, S. D., Chiu, A., Yoo, S. S., & Park, S. (2014). Estimation of the spatial profile of neuromodulation and the temporal latency in motor responses induced by focused ultrasound brain stimulation. Neuroreport, 25(7), 475.
Park, J., & Park, S. (2014). Reduction of arm fatigue and discomfort using a novel steering wheel design. International journal of precision engineering and manufacturing, 15(5), 803-810.
Kim, B. S., Park, S., Song, J. B., & Kim, B. (2013). Equilibrium point control of a robot manipulator using biologically-inspired redundant actuation system. Advanced Robotics, 27(8), 567-579.
Choi, D., Choi, J., Cho, C., Park, S., & Kang, S. (2013). A safe robot arm with safe joints and gravity compensator. International Journal of Control, Automation and Systems, 11(2), 362-368.
Yoo, S. S., Kim, H., Filandrianos, E., Taghados, S. J., & Park, S. (2013). Non-invasive brain-to-brain interface (BBI): establishing functional links between two brains. PloS one, 8(4), e60410.
Jung, K., Chu, B., Park, S., & Hong, D. (2013). An implementation of a teleoperation system for robotic beam assembly in construction. International Journal of Precision Engineering and Manufacturing, 14(3), 351-358.
Park, S. J., Kim, E., Jeong, H. J., Lee, J., & Park, S. (2012). Prediction of the rotational state of the humerus by comparing the contour of the contralateral bicipital groove: Method for intraoperative evaluation. Indian journal of orthopaedics, 46(6), 675.
Kim, H., Chiu, A., Park, S., & Yoo, S. S. (2012). Image‐guided navigation of single‐element focused ultrasound transducer. International journal of imaging systems and technology, 22(3), 177-184.
Kim, H., Taghados, S. J., Fischer, K., Maeng, L. S., Park, S., & Yoo, S. S. (2012). Noninvasive transcranial stimulation of rat abducens nerve by focused ultrasound. Ultrasound in Medicine and Biology, 38(9), 1568-1575.
Yang, G. H., Ryu, D., Park, S., & Kang, S. (2012). Sensory saltation and phantom sensation for vibrotactile display of spatial and directional information. Presence: Teleoperators and Virtual Environments, 21(2), 192-202.
Yang, P. S., Kim, H., Lee, W., Bohlke, M., Park, S., Maher, T. J., & Yoo, S. S. (2012). Transcranial focused ultrasound to the thalamus is associated with reduced extracellular GABA levels in rats. Neuropsychobiology, 65(3), 153-160.
Yoo, S. S., Kim, H., Min, B. K., & Franck, S. P. E. (2011). Transcranial focused ultrasound to the thalamus alters anesthesia time in rats. Neuroreport, 22(15), 783.
Min, B. K., Yang, P. S., Bohlke, M., Park, S., R Vago, D., Maher, T. J., & Yoo, S. S. (2011). Focused ultrasound modulates the level of cortical neurotransmitters: Potential as a new functional brain mapping technique. International Journal of Imaging Systems and Technology, 21(2), 232-240.
Park, J., Kim, H., Chung, W., & Park, S. (2011). Comparison of myocontrol and force control based on fitts’ law model. International Journal of Precision Engineering and Manufacturing, 12(2), 211-217.
Research
수행 과제 목록
미래형자동차 핵심기술 R&D 전문인력양성 (한국산업기술진흥원, 220301~270228)
강화학습과 ROS를 사용한 IOT 기반 기술 탐색 ((주)현대모비스, 220926~230626)
4족 및 2족 보행 로봇의 원격 제어를 위한 Human-Robot Interface 및 머신러닝 기반의 준자동화 기술 개발 (한국연구재단, 200301~230228)
운동기능 향상을 위한 하이브리드 스마트 의복 및 모니터링 시스템(서울올림픽기념국민체육진흥공단, 190901~201231)
ADAS 제어기 정상개입여부 평가를 위한 기계학습 기반 운전자 의도판단 알고리즘 개발((주)현대엔지비, 181001~190331)
인간중심 소프트 로봇기술 연구센터 (한국연구재단, 161101~221231)
Development of Edge-Heavy Robotic Platform ((주)소프트모션앤로보틱스, 181115~191114)
재난 현장 구조 및 인도적 지원을 위한 차세대 로봇 원천기술 한미 공동 연구 (한국산업기술평가관리원, 161001~190931)
근육계와 신경계의 동시 자극이 가능한 재활치료용 로봇의 통합 인터페이스 개발 (한국연구재단, 160601~190531)
기계학습기법과 조향계 동역학 모델을 이용한 운전자 조타 의지 판단 및 조타력 추정 알고리즘 개발 (㈜현대엔지비, 171201~180530)
맞춤형 재활훈련을 위한 Human-Human Interface 기술 개발 (한국과학기술연구원, 150401~171230)
Control of Robots with Supervisory Autonomy Using Multimodal Human-Machine Interface (Lockheed martin corporation, 161011~171130)
군사용 무인로봇의 원격 조종을 위한 Human-Machine Interface의 개발 (국방과학연구소, 141215~171005)
실시간 장애물 회피 자동 조작을 위한 차량 동역학 기반의 알고리즘 개발 (㈜현대엔지비, 160215~160810)
운전자 의도 판달을 위한 기계학습 알고리즘 조사 및 최적 알고리즘 제안 (㈜현대엔지비, 160215~160810)에이스커트 파손 방지 설계 및 시뮬레이션 (㈜현대엔지비, 150501~151030)생체신호 기반의 재활용 Human-Human Interface 기술 개발 (한국과학기술연구원, 140301~141230)의료영상 기반 수술 지원 시스템 개발 (한국연구재단, 100901~130830)Teaching
수업목록
MECH226 - 동역학, Dynamics
MECH483 - 로봇공학, Robotics
MECH688 - 인간기계상호작용, Human-Machine Interaction
MECH703 - 바이오시스템해석, Biosystem Analysis
Lab Members
Students
students 
박정원 (2021.03~Present)
고려대학교 공과대학 기계공학부 박사 과정
Email: jackdaw302@korea.ac.kr

박규태 (2019.03~Present)
고려대학교 공과대학 기계공학부 석사 과정
Email: kpark0809@naver.com

이승엽 (2022.09~Present)
고려대학교 공과대학 기계공학부 석사 과정
Email: leesy0906@korea.ac.kr

오시은 (2023.03~Present)
고려대학교 스마트융합학과 석사 과정
Email: osean00@korea.ac.kr

서준용 (2024.03~Present)
고려대학교 공과대학 기계공학부 석사 과정
Email: junyong9939@korea.ac.kr

차준혁 (2024.03~Present)
고려대학교 스마트융합학과 석사 과정
Email: juneboy11@korea.ac.kr
Students (part-time)
students 
이효근 (2016.03~Present)
고려대학교 공과대학 기계공학부 박사 과정

김하은 (2021.09~Present)
고려대학교 공과대학 기계공학부 박사 과정

전민준 (2021.09~Present)
고려대학교 공과대학 기계공학부 박사 과정

이동진 (2019.03~Present)
고려대학교 공과대학 기계공학부 석사 과정
Students (undergraduate researcher)
students 
주현영 (2023.07~Present)
고려대학교 공과대학 전기전자공학부 학부 과정

최성민 (2024.01~Present)
고려대학교 공과대학 기계공학부 학부 과정

김정현 (2024.01~Present)
고려대학교 공과대학 기계공학부 학부 과정

심준용 (2024.01~Present)
Alumni (Ph.D)
students 
박장우 (2018.08 졸업)
고려대학교 공과대학 기계공학부 박사

봉재환 (2020.02 졸업)
고려대학교 공과대학 기계공학부 박사

정수훈 (2021.08 졸업)
고려대학교 공과대학 기계공학부 박사
Alumni (Master's degree)
students 
임혁진 (2007.02 졸업)
고려대학교 공과대학 기계공학부 석사

김성준 (2007.02 졸업)
고려대학교 공과대학 기계공학부 석사

故 김병찬 (2007.08 졸업)
고려대학교 공과대학 기계공학부 석사

문진기 (2008.02 졸업)
고려대학교 공과대학 기계공학부 석사

강병덕 (2008.02 졸업)
고려대학교 공과대학 기계공학부 석사

손영완 (2009.02 졸업)
고려대학교 공과대학 기계공학부 석사
장명수 (2009.02 졸업)
고려대학교 공과대학 기계공학부 석사

이상화 (2009.02 졸업)
고려대학교 공과대학 기계공학부 석사

정회주 (2011.02 졸업)
고려대학교 공과대학 기계공학부 석사
동용원 (2011.02 졸업)
고려대학교 공과대학 기계공학부 석사
이상우 (2011.08 졸업)
고려대학교 공과대학 기계공학부 석사
우일 (2012.02 졸업)
고려대학교 공과대학 기계공학부 석사

송현종 (2012.02 졸업)
고려대학교 공과대학 기계공학부 석사

라인찬 (2013.02 졸업)
고려대학교 공과대학 기계공학부 석사

장호근 (2016.02 졸업)
고려대학교 자동차융합학과 석사

김일환 (2017.02 졸업)
고려대학교 자동차융합학과 석사

강동훈 (2017.02 졸업)
고려대학교 자동차융합학과 석사

오유진 (2017.08 졸업)
고려대학교 공과대학 기계공학부 석사

김경현 (2019.02 졸업)
고려대학교 자동차융합학과 석사
김하은 (2020.02 졸업)
고려대학교 자동차융합학과 석사

김형우 (2020.02 졸업)
고려대학교 공과대학 기계공학부 석사
전민준 (2020.02 졸업)
고려대학교 자동차융합학과 석사

홍진 (2020.02 졸업)
고려대학교 공과대학 기계공학부 석사

최선웅 (2020.08 졸업)
고려대학교 공과대학 기계공학부 석사

김준휘 (2021.02 졸업)
고려대학교 공과대학 기계공학부 석사

한의현 (2021.08 졸업)
고려대학교 공과대학 기계공학부 석사

김홍식 (2022.02 졸업)
고려대학교 스마트융합학과 석사

정현석 (2022.02 졸업)
고려대학교 스마트융합학과 석사

이재우 (2022.08 졸업)
고려대학교 공과대학 기계공학부 석사

구윤회 (2022.08 졸업)
고려대학교 공과대학 기계공학부 석사

이태훈 (2023.02 졸업)
고려대학교 스마트융합학과 석사

심창용 (2023.02 졸업)
고려대학교 공과대학 기계공학부 석사

김혜윤 (2024.02 졸업)
고려대학교 공과대학 기계공학부 석사

모규민 (2024.02 졸업)
고려대학교 공과대학 기계공학부 석사

채지헌 (2024.02 졸업)
고려대학교 스마트융합학과 석사